AC 自动机
概述
AC(Aho–Corasick)自动机是 以 Trie 的结构为基础,结合 KMP 的思想 建立的自动机,用于解决多模式匹配等任务.
AC 自动机本质上是 Trie 上的自动机.
在阅读本文之前,请先阅读 KMP 和 Trie.
解释
简单来说,建立一个 AC 自动机有两个步骤:
- 基础的 Trie 结构:将所有的模式串构成一棵 Trie;
- KMP 的思想:对 Trie 树上所有的结点构造失配指针.
建立完毕后,就可以利用它进行多模式匹配.
字典树构建
AC 自动机在初始时会将若干个模式串插入到一个 Trie 里,然后在 Trie 上建立 AC 自动机.这个 Trie 就是普通的 Trie,按照 Trie 原本的建树方法建树即可.
需要注意的是,Trie 中的结点表示的是某个模式串的前缀.我们在后文也将其称作状态.一个结点表示一个状态,Trie 的边就是状态的转移.
形式化地说,对于若干个模式串 𝑠1,𝑠2,⋯,𝑠𝑛 ,将它们构建一棵字典树后的所有状态的集合记作 𝑄.
,将它们构建一棵字典树后的所有状态的集合记作 𝑄.
失配指针
AC 自动机利用一个 fail 指针来辅助多模式串的匹配.
状态 𝑢 的 fail 指针指向另一个状态 𝑣,其中 𝑣 ∈𝑄,且 𝑣 是 𝑢 的最长后缀(即在若干个后缀状态中取最长的一个作为 fail 指针).
fail 指针与 KMP 中的 next 指针相比:
- 共同点:两者同样是在失配的时候用于跳转的指针.
- 不同点:next 指针求的是最长 Border(即最长的相同前后缀),而 fail 指针指向所有模式串的前缀中匹配当前状态的最长后缀.
因为 KMP 只对一个模式串做匹配,而 AC 自动机要对多个模式串做匹配.有可能 fail 指针指向的结点对应着另一个模式串,两者前缀不同.
总结下来,AC 自动机的失配指针指向当前状态的最长后缀状态.
注意:AC 自动机在做匹配时,同一位上可匹配多个模式串.
构建指针
下面介绍构建 fail 指针的 基础思想:
构建 fail 指针,可以参考 KMP 中构造 next 指针的思想.
考虑字典树中当前的结点 𝑢,𝑢 的父结点是 𝑝,𝑝 通过字符 𝑐 的边指向 𝑢,即 trie(𝑝,𝑐) =𝑢.假设深度小于 𝑢 的所有结点的 fail 指针都已求得.
- 如果 trie(fail(𝑝),𝑐) 存在:则让 𝑢 的 fail 指针指向 trie(fail(𝑝),𝑐).相当于在 𝑝 和 fail(𝑝) 后面加一个字符 𝑐,分别对应 𝑢 和 fail(𝑢);
- 如果 trie(fail(𝑝),𝑐) 不存在:那么我们继续找到 trie(fail(fail(𝑝)),𝑐).重复判断过程,一直跳 fail 指针直到根结点;
- 如果依然不存在,就让 fail 指针指向根结点.
如此即完成了 fail(𝑢) 的构建.
例子
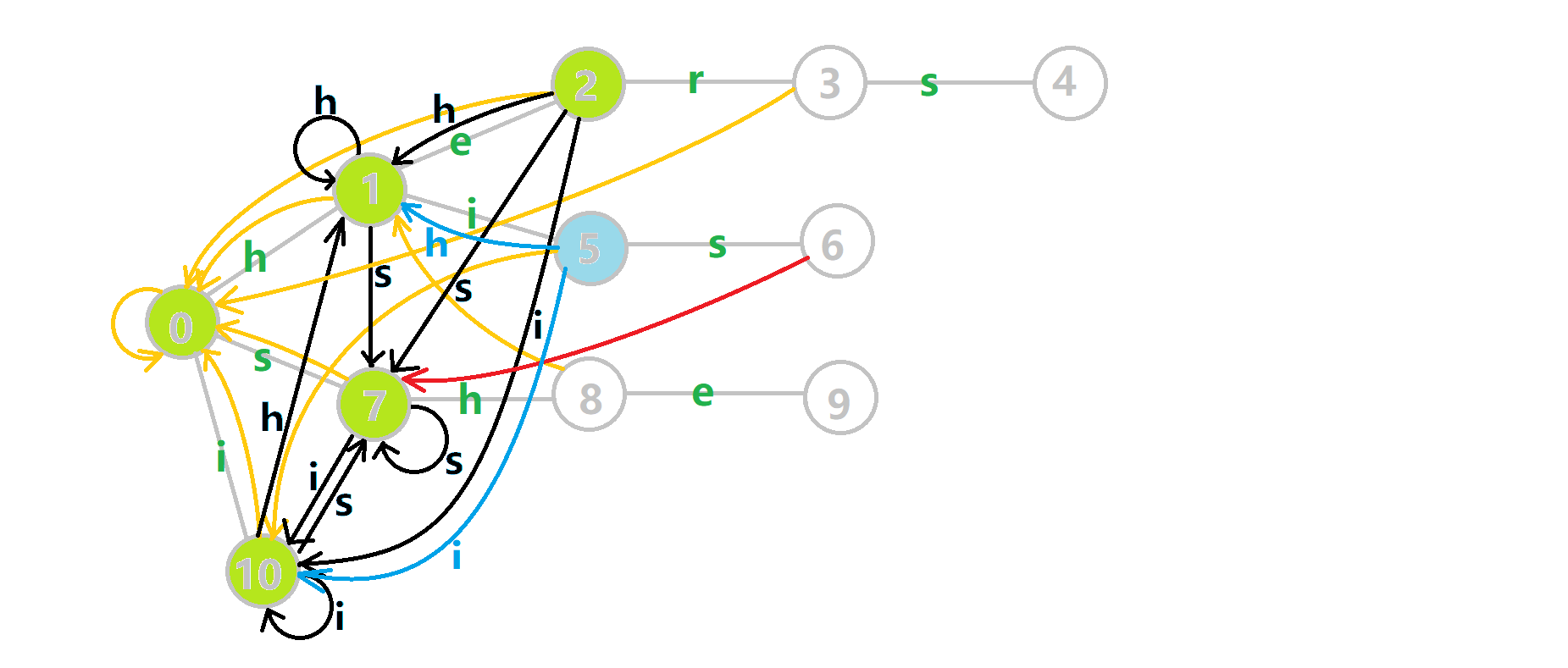
下面将使用若干张 GIF 动图来演示对字符串 𝚒、𝚑𝚎、𝚑𝚒𝚜、𝚜𝚑𝚎、𝚑𝚎𝚛𝚜 组成的字典树构建 fail 指针的过程:
- 黄色结点:当前的结点 𝑢.
- 绿色结点:表示已经 BFS 遍历完毕的结点.
- 橙色的边:fail 指针.
- 红色的边:当前求出的 fail 指针.
我们重点分析结点 6 的 fail 指针构建:
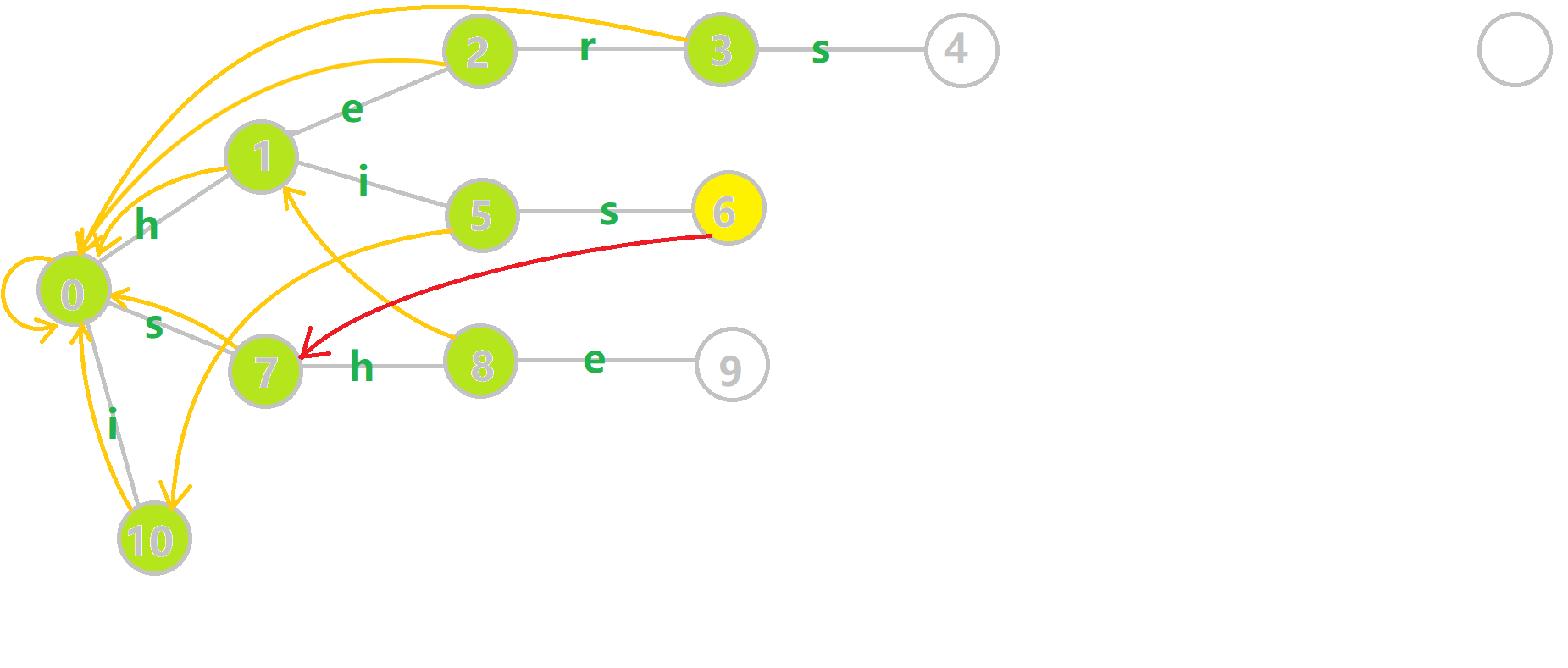
找到 6 的父结点 5,fail(5) =10.然而结点 10 没有字母 𝚜 连出的边;继续跳到 10 的 fail 指针,fail(10) =0.发现 0 结点有字母 𝚜 连出的边,指向 7 结点;所以 fail(6) =7.
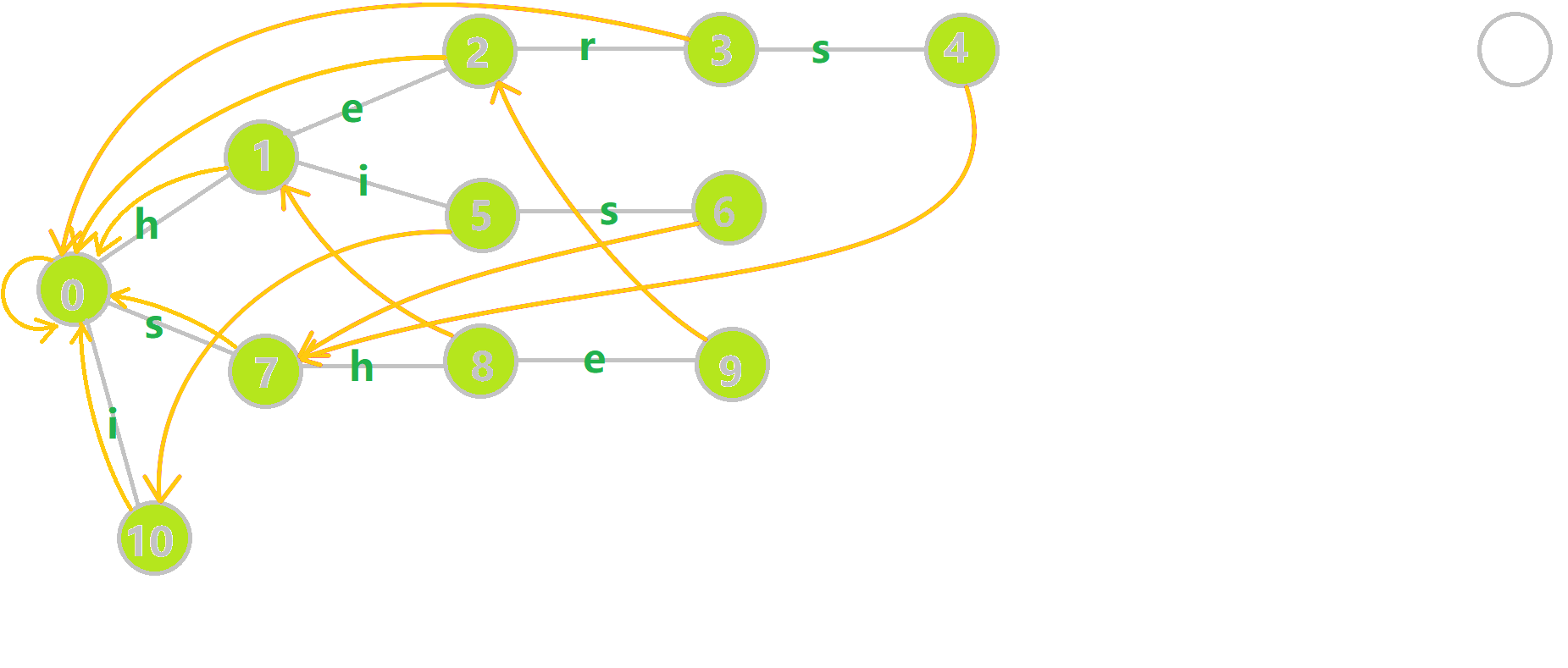
下图展示了构建完毕的状态:
字典树与字典图
关注构建函数 build,该函数的目标有两个,一个是构建 fail 指针,一个是构建自动机.相关变量定义如下:
tr[u].son[c]:有两种理解方式.我们可以简单理解为字典树上的一条边,即 trie(𝑢,𝑐);也可以理解为从状态(结点)𝑢 后加一个字符 𝑐 到达的状态(结点),即一个状态转移函数 trans(𝑢,𝑐).为了方便,下文中我们将用第二种理解方式.- 队列
q:用于 BFS 遍历字典树. tr[u].fail:结点 𝑢 的 fail 指针.
实现
解释
build 函数将结点按 BFS 顺序入队,依次求 fail 指针.这里的字典树根结点为 0,我们将根结点的子结点一一入队.若将根结点入队,则在第一次 BFS 的时候,会将根结点儿子的 fail 指针标记为本身.因此我们将根结点的儿子一一入队,而不是将根结点入队.
然后开始 BFS:每次取出队首的结点 𝑢(fail(𝑢) 在之前的 BFS 过程中已求得),然后遍历字符集(这里是 0 ∼25,对应 𝚊 ∼𝚣,即 𝑢 的各个子结点):
- 如果 trans(𝑢,𝑐) 存在,我们就将 trans(𝑢,𝑐) 的 fail 指针赋值为 trans(fail(𝑢),𝑐).根据之前的描述,我们应该用
while 循环,不停地跳 fail 指针,判断是否存在字符 𝑐 对应的结点,然后赋值,但此处通过特殊处理简化了这些代码,将在下文说明; - 否则,令 trans(𝑢,𝑐) 指向 trans(fail(𝑢),𝑐) 的状态.
这里的处理是,通过 else 语句的代码修改字典树的结构,将不存在的字典树的状态链接到了失配指针的对应状态.在原字典树中,每一个结点代表一个字符串 𝑆,是某个模式串的前缀.而在修改字典树结构后,尽管增加了许多转移关系,但结点(状态)所代表的字符串是不变的.
而 trans(𝑆,𝑐) 相当于是在 𝑆 后添加一个字符 𝑐 变成另一个状态 𝑆′.如果 𝑆′ 存在,说明存在一个模式串的前缀是 𝑆′,否则我们让 trans(𝑆,𝑐) 指向 trans(fail(𝑆),𝑐).由于 fail(𝑆) 对应的字符串是 𝑆 的后缀,因此 trans(fail(𝑆),𝑐) 对应的字符串也是 𝑆′ 的后缀.
换言之在 Trie 上跳转的时候,我们只会从 𝑆 跳转到 𝑆′,相当于匹配了一个 𝑆′;但在 AC 自动机上跳转的时候,我们会从 𝑆 跳转到 𝑆′ 的后缀,也就是说我们匹配一个字符 𝑐,然后舍弃 𝑆 的部分前缀.舍弃前缀显然是能匹配的.同时如果文本串能匹配 𝑆,显然它也能匹配 𝑆 的后缀,所以 fail 指针同样在舍弃前缀.所谓的 fail 指针其实就是 𝑆 的一个后缀集合.
Trie 的结点的孩子数组 son 还有另一种比较简单的理解方式:如果在位置 𝑢 失配,我们会跳转到 fail(𝑢) 的位置.注意这会导致我们可能沿着 fail 数组跳转多次才能来到下一个能匹配的位置.所以我们可以用 son 直接记录下一个能匹配的位置,这样保证了程序的时间复杂度.
此处对字典树结构的修改,可以使得匹配转移更加完善.同时它将 fail 指针跳转的路径做了压缩,使得本来需要跳很多次 fail 指针变成跳一次.
过程
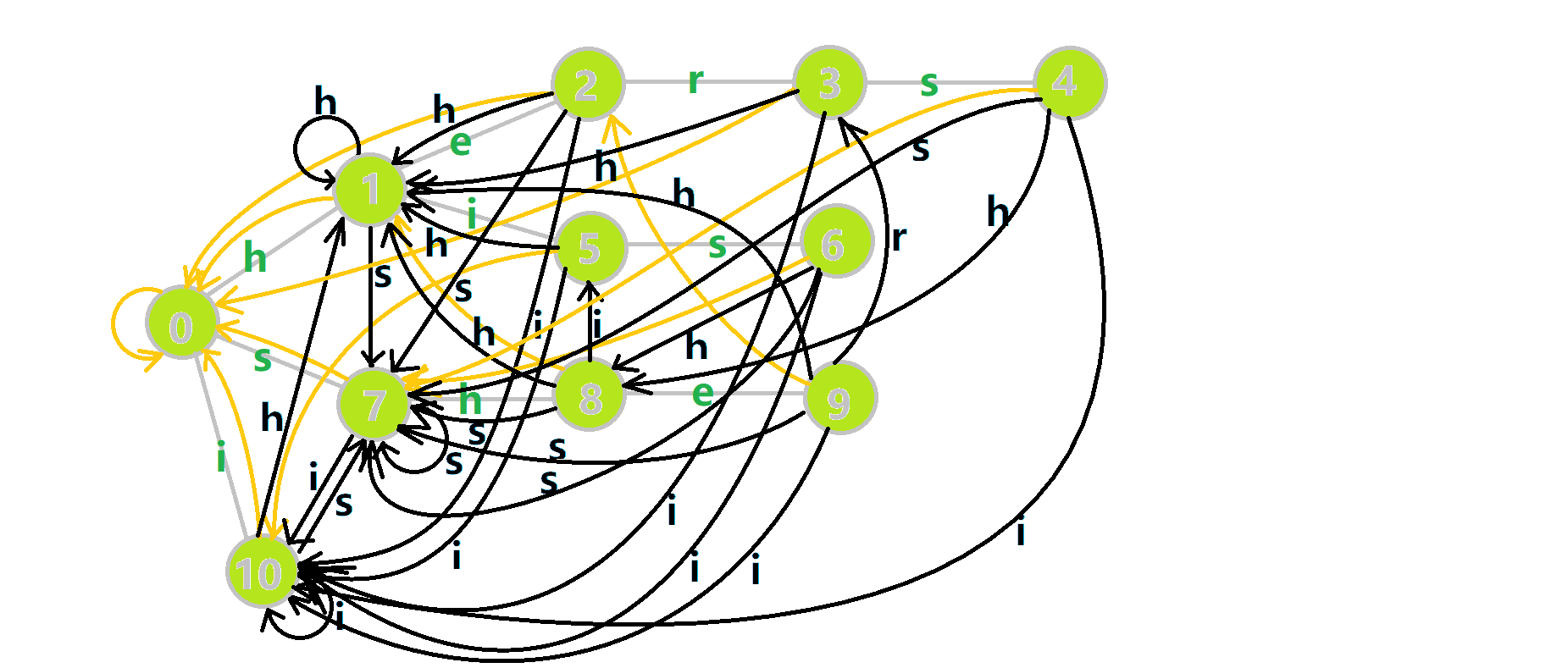
这里依然用若干张 GIF 动图展示构建过程:
- 蓝色结点:BFS 遍历到的结点 𝑢.
- 蓝色的边:当前结点下,AC 自动机修改字典树结构连出的边.
- 黑色的边:AC 自动机修改字典树结构连出的边.
- 红色的边:当前结点求出的 fail 指针.
- 黄色的边:fail 指针.
- 灰色的边:字典树的边.
可以发现,众多交错的黑色边将字典树变成了 字典图.图中省略了连向根结点的黑边(否则会更乱).我们重点分析一下结点 5 遍历时的情况.我们求 trans(5,𝚜) =6 的 fail 指针:
本来的策略是找 fail 指针,于是我们跳到 fail(5) =10 发现没有 𝚜 连出的字典树的边,于是跳到 fail(10) =0,发现有 trie(0,𝚜) =7,于是 fail(6) =7;但是有了黑边、蓝边,我们跳到 fail(5) =10 之后直接走 trans(10,𝚜) =7 就走到 7 号结点了.
这就是 build 完成的两件事:构建 fail 指针和建立字典图.这个字典图也会在查询的时候起到关键作用.
多模式匹配
接下来分析匹配函数 query:
实现
解释
这里 𝑢 作为字典树上当前匹配到的结点,res 即返回的答案.循环遍历匹配串,𝑢 在字典树上跟踪当前字符.利用 fail 指针找出所有匹配的模式串,并累加到答案中.然后将匹配到的串的出现次数清零,这样就不会重复统计同一个串.在上文中我们分析过,字典树的结构其实就是一个 trans 函数,而构建好这个函数后,在匹配字符串的过程中,我们会舍弃部分前缀达到最低限度的匹配.fail 指针则指向了更多的匹配状态.最后上一份图.对于刚才的自动机:
我们从根结点开始尝试匹配 𝚞𝚜𝚑𝚎𝚛𝚜𝚑𝚎𝚒𝚜𝚑𝚒𝚜,那么 𝑝 的变化将是:
- 红色结点:𝑝 结点.
- 粉色箭头:𝑝 在自动机上的跳转.
- 蓝色的边:成功匹配的模式串.
- 蓝色结点:示跳 fail 指针时的结点(状态).
效率优化
题目请参考洛谷 P5357【模板】AC 自动机.
因为我们的 AC 自动机中,每次匹配,会一直向 fail 边跳来找到所有的匹配,但是这样的效率较低,在某些题目中会超时.
那么需要如何优化呢?首先需要了解到 fail 指针的一个性质:一个 AC 自动机中,如果只保留 fail 边,那么剩余的图一定是一棵树.
这是显然的,因为 fail 不会成环,且深度一定比现在低,所以得证.
这样 AC 自动机的匹配就可以转化为在 fail 树上的链求和问题,只需要优化一下该部分就可以了.
这里提供两种思路.
拓扑排序优化
观察到时间主要浪费在每次都要跳 fail.如果我们可以预先记录,最后一并求和,那么效率就会优化.
于是我们按照 fail 树,做一次内向树上的拓扑排序,就能一次性求出所有模式串的出现次数.
build 函数在原先的基础上,增加了入度统计一部分,为拓扑排序做准备.
构建
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17 | void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i]) q.push(tr[0].son[i]);
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) {
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i];
tr[tr[tr[u].fail].son[i]].du++; // 入度计数
q.push(tr[u].son[i]);
} else
tr[u].son[i] = tr[tr[u].fail].son[i];
}
}
}
|
然后我们在查询的时候就可以只为找到结点的 ans 打上标记,在最后再用拓扑排序求出答案.
查询
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21 | void query(const char t[]) {
int u = 0;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a'];
tr[u].ans++;
}
}
void topu() {
queue<int> q;
for (int i = 0; i <= tot; i++)
if (tr[i].du == 0) q.push(i);
while (!q.empty()) {
int u = q.front();
q.pop();
ans[tr[u].idx] = tr[u].ans;
int v = tr[u].fail;
tr[v].ans += tr[u].ans;
if (!--tr[v].du) q.push(v);
}
}
|
最后是主函数:
主函数
| int main() {
// do_something();
AC::build();
scanf("%s", s + 1);
AC::query(s);
AC::topu();
for (int i = 1; i <= n; i++) printf("%d\n", AC::ans[idx[i]]);
// do_another_thing();
}
|
模板题 Luogu P5357「模板」AC 自动机 拓扑排序优化参考代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108 | #include <cstdio>
#include <cstring>
#include <queue>
using namespace std;
constexpr int N = 2e5 + 6;
constexpr int LEN = 2e6 + 6;
constexpr int SIZE = 2e5 + 6;
int n;
namespace AC {
struct Node {
int son[26]; // 子结点
int ans; // 匹配计数
int fail; // fail 指针
int du; // 入度
int idx;
void init() { // 结点初始化
memset(son, 0, sizeof(son));
ans = fail = idx = 0;
}
} tr[SIZE];
int tot; // 结点总数
int ans[N], pidx;
void init() {
tot = pidx = 0;
tr[0].init();
}
void insert(char s[], int &idx) {
int u = 0;
for (int i = 1; s[i]; i++) {
int &son = tr[u].son[s[i] - 'a']; // 下一个子结点的引用
if (!son) son = ++tot, tr[son].init(); // 如果没有则插入新结点,并初始化
u = son; // 从下一个结点继续
}
// 由于有可能出现相同的模式串,需要将相同的映射到同一个编号
if (!tr[u].idx) tr[u].idx = ++pidx; // 第一次出现,新增编号
idx = tr[u].idx; // 这个模式串的编号对应这个结点的编号
}
void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i]) q.push(tr[0].son[i]);
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) { // 存在对应子结点
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i]; // 只用跳一次 fail 指针
tr[tr[tr[u].fail].son[i]].du++; // 入度计数
q.push(tr[u].son[i]); // 并加入队列
} else
tr[u].son[i] =
tr[tr[u].fail]
.son[i]; // 将不存在的字典树的状态链接到了失配指针的对应状态
}
}
}
void query(char t[]) {
int u = 0;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a']; // 转移
tr[u].ans++;
}
}
void topu() {
queue<int> q;
for (int i = 0; i <= tot; i++)
if (tr[i].du == 0) q.push(i);
while (!q.empty()) {
int u = q.front();
q.pop();
ans[tr[u].idx] = tr[u].ans;
int v = tr[u].fail;
tr[v].ans += tr[u].ans;
if (!--tr[v].du) q.push(v);
}
}
} // namespace AC
char s[LEN];
int idx[N];
int main() {
AC::init();
scanf("%d", &n);
for (int i = 1; i <= n; i++) {
scanf("%s", s + 1);
AC::insert(s, idx[i]);
AC::ans[i] = 0;
}
AC::build();
scanf("%s", s + 1);
AC::query(s);
AC::topu();
for (int i = 1; i <= n; i++) {
printf("%d\n", AC::ans[idx[i]]);
}
return 0;
}
|
DFS 优化
和拓扑排序的思路接近,不过我们使用 DFS 来代替拓扑排序.其实这两种方法本质上是相同的,都是将 fail 树的子树求和.
完整代码请见总结模板 3.
AC 自动机上 DP
这部分将以 P2292 [HNOI2004] L 语言 为例题讲解.
不难想到一个朴素的思路:建立 AC 自动机,在 AC 自动机上对于所有 fail 指针的子串转移,最后取最大值得到答案.
主要代码如下.若不熟悉代码中的类型定义,可以先看末尾的完整代码:
查询部分主要代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15 | int query(const char t[]) {
int u = 0, len = strlen(t + 1);
for (int i = 1; i <= len; i++) dp[i] = 0;
for (int i = 1; i <= len; i++) {
u = tr[u].son[t[i] - 'a'];
for (int j = u; j; j = tr[j].fail) {
if (tr[j].idx && (dp[i - tr[j].depth] || i - tr[j].depth == 0)) {
dp[i] = dp[i - tr[j].depth] + tr[j].depth;
}
}
}
int ans = 0;
for (int i = 1; i <= len; i++) ans = std::max(ans, dp[i]);
return ans;
}
|
但是这样的思路复杂度不是线性(因为要跳每个结点的 fail),会在第二个子任务中超时,所以我们需要进行优化.
我们再看看题目的特殊性质,我们发现所有单词的长度只有 20,所以可以想到状态压缩优化.
我们发现,目前的时间瓶颈主要在跳 fail 这一步,如果我们可以将这一步优化到 𝑂(1),就可以保证整个问题在严格线性的时间内被解出.
我们可以将前 20 位字母中,可能的子串长度存下来,并压缩到状态中,存在每个子结点中.
那么我们在 build 的时候就可以这么写:
构建 fail 指针
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24 | void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i]) {
q.push(tr[0].son[i]);
tr[tr[0].son[i]].depth = 1;
}
while (!q.empty()) {
int u = q.front();
q.pop();
int v = tr[u].fail;
// 对状态的更新在这里
tr[u].stat = tr[v].stat;
if (tr[u].idx) tr[u].stat |= 1 << tr[u].depth;
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) {
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i];
tr[tr[u].son[i]].depth = tr[u].depth + 1; // 记录深度
q.push(tr[u].son[i]);
} else
tr[u].son[i] = tr[tr[u].fail].son[i];
}
}
}
|
然后查询时就可以去掉跳 fail 的循环,将代码简化如下:
查询
| int query(const char t[]) {
int u = 0, mx = 0;
unsigned st = 1;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a'];
st <<= 1; // 往下跳了一位每一位的长度都+1
if (tr[u].stat & st) st |= 1, mx = i;
}
return mx;
}
|
我们的 tr[u].stat 维护的是从结点 𝑢 开始,整条 fail 链上的长度集(因为长度集小于 32 所以不影响),而 st 则维护的是查询字符串走到现在,前 32 位(因为状态压缩自然溢出)的长度集.
& 运算后结果不为 0,则代表两个长度集的交集非空,我们此时就找到了一个匹配.
P2292 [HNOI2004] L 语言 完整代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95 | #include <cstdio>
#include <cstring>
#include <queue>
using namespace std;
constexpr int N = 20 + 6, M = 50 + 6;
constexpr int LEN = 2e6 + 6;
constexpr int SIZE = 450 + 6;
int n, m;
namespace AC {
struct Node {
int son[26];
int fail;
int idx;
int depth;
unsigned stat;
void init() {
memset(son, 0, sizeof(son));
fail = idx = depth = 0;
}
} tr[SIZE];
int tot;
void init() {
tot = 0;
tr[0].init();
}
void insert(char s[], int idx) {
int u = 0;
for (int i = 1; s[i]; i++) {
int &son = tr[u].son[s[i] - 'a'];
if (!son) son = ++tot, tr[son].init();
u = son;
}
tr[u].idx = idx;
}
void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i]) {
q.push(tr[0].son[i]);
tr[tr[0].son[i]].depth = 1;
}
while (!q.empty()) {
int u = q.front();
q.pop();
int v = tr[u].fail;
// 对状态的更新在这里
tr[u].stat = tr[v].stat;
if (tr[u].idx) tr[u].stat |= 1 << tr[u].depth;
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) {
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i];
tr[tr[u].son[i]].depth = tr[u].depth + 1; // 记录深度
q.push(tr[u].son[i]);
} else
tr[u].son[i] = tr[tr[u].fail].son[i];
}
}
}
int query(char t[]) {
int u = 0, mx = 0;
unsigned st = 1;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a'];
st <<= 1;
if (tr[u].stat & st) st |= 1, mx = i;
}
return mx;
}
} // namespace AC
char s[LEN];
int main() {
AC::init();
scanf("%d%d", &n, &m);
for (int i = 1; i <= n; i++) {
scanf("%s", s + 1);
AC::insert(s, i);
}
AC::build();
for (int i = 1; i <= m; i++) {
scanf("%s", s + 1);
printf("%d\n", AC::query(s));
}
return 0;
}
|
总结
时间复杂度:定义 |𝑠𝑖| 是模板串的长度,|𝑆| 是文本串的长度,|Σ| 是字符集的大小(常数,一般为 26).如果连了 trie 图,时间复杂度就是 𝑂(∑|𝑠𝑖| +𝑛|Σ| +|𝑆|),其中 𝑛 是 AC 自动机中结点的数目,并且最大可以达到 𝑂(∑|𝑠𝑖|).如果不连 trie 图,并且在构建 fail 指针的时候避免遍历到空儿子,时间复杂度就是 𝑂(∑|𝑠𝑖| +|𝑆|).
模板题 Luogu P3808 AC 自动机(简单版) 参考代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85 | #include <cstdio>
#include <cstring>
#include <queue>
using namespace std;
constexpr int N = 1e6 + 6;
constexpr int LEN = 1e6 + 6;
constexpr int SIZE = 1e6 + 6;
int n;
namespace AC {
struct Node {
int son[26]; // 子结点
int cnt; // 尾为该结点的串的个数
int fail; // fail 指针
void init() { // 结点初始化
memset(son, 0, sizeof(son));
cnt = fail = 0;
}
} tr[SIZE];
int tot; // 结点总数
void init() {
tot = 0;
tr[0].init();
}
void insert(char s[]) {
int u = 0;
for (int i = 1; s[i]; i++) {
int &son = tr[u].son[s[i] - 'a']; // 下一个子结点的引用
if (!son) son = ++tot, tr[son].init(); // 如果没有则插入新结点,并初始化
u = son; // 从下一个结点继续
}
tr[u].cnt++;
}
void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i]) q.push(tr[0].son[i]);
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) { // 存在对应子结点
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i]; // 只用跳一次 fail 指针
q.push(tr[u].son[i]); // 并加入队列
} else
tr[u].son[i] =
tr[tr[u].fail]
.son[i]; // 将不存在的字典树的状态链接到了失配指针的对应状态
}
}
}
int query(char t[]) {
int u = 0, res = 0;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a']; // 转移
for (int j = u; j && tr[j].cnt != -1; j = tr[j].fail) {
res += tr[j].cnt, tr[j].cnt = -1;
}
}
return res;
}
} // namespace AC
char s[LEN];
int main() {
AC::init();
scanf("%d", &n);
for (int i = 1; i <= n; i++) {
scanf("%s", s + 1);
AC::insert(s);
}
AC::build();
scanf("%s", s + 1);
printf("%d", AC::query(s));
return 0;
}
|
模板题 Luogu P3796 AC 自动机(简单版 II) 参考代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90 | #include <cstdio>
#include <cstring>
#include <queue>
using namespace std;
constexpr int N = 150 + 6;
constexpr int LEN = 1e6 + 6;
constexpr int SIZE = N * 70 + 6;
int n;
namespace AC {
struct Node {
int son[26];
int fail;
int idx;
void init() {
memset(son, 0, sizeof(son));
idx = fail = 0;
}
} tr[SIZE];
int tot;
void init() {
tot = 0;
tr[0].init();
}
void insert(char s[], int idx) { // 将第 idx 个字符串 s 插入
int u = 0;
for (int i = 1; s[i]; i++) {
int &son = tr[u].son[s[i] - 'a'];
if (!son) son = ++tot, tr[son].init();
u = son;
}
tr[u].idx = idx;
}
void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i]) q.push(tr[0].son[i]);
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) {
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i];
q.push(tr[u].son[i]);
} else
tr[u].son[i] = tr[tr[u].fail].son[i];
}
}
}
int query(char t[], int cnt[]) {
int u = 0, res = 0;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a'];
for (int j = u; j; j = tr[j].fail)
++cnt[tr[j].idx]; // 统计每个字符串出现的次数
}
for (int i = 0; i <= tot; ++i)
if (tr[i].idx) res = max(res, cnt[tr[i].idx]);
return res;
}
} // namespace AC
char s[N][75], t[LEN];
int cnt[N]; // 每一个字符串出现的次数
int main() {
while (scanf("%d", &n) != EOF && n != 0) {
AC::init();
for (int i = 1; i <= n; i++) {
scanf("%s", s[i] + 1);
AC::insert(s[i], i);
cnt[i] = 0;
}
AC::build();
scanf("%s", t + 1);
int x = AC::query(t, cnt);
printf("%d\n", x);
for (int i = 1; i <= n; i++)
if (cnt[i] == x) printf("%s\n", s[i] + 1);
}
return 0;
}
|
模板题 Luogu P5357「模板」AC 自动机 DFS 优化参考代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105 | #include <cstdio>
#include <cstring>
#include <queue>
#include <vector>
using namespace std;
constexpr int N = 2e5 + 6;
constexpr int LEN = 2e6 + 6;
constexpr int SIZE = 2e5 + 6;
int n;
namespace AC {
struct Node {
int son[26];
int ans;
int fail;
int idx;
void init() {
memset(son, 0, sizeof(son));
ans = idx = 0;
}
} tr[SIZE];
int tot;
int ans[N], pidx;
vector<int> g[SIZE]; // fail 树
void init() {
tot = pidx = 0;
tr[0].init();
}
void insert(char s[], int &idx) {
int u = 0;
for (int i = 1; s[i]; i++) {
int &son = tr[u].son[s[i] - 'a'];
if (!son) son = ++tot, tr[son].init();
u = son;
}
// 由于有可能出现相同的模式串,需要将相同的映射到同一个编号
if (!tr[u].idx) tr[u].idx = ++pidx; // 第一次出现,新增编号
idx = tr[u].idx; // 这个模式串的编号对应这个结点的编号
}
void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i]) {
q.push(tr[0].son[i]);
g[0].push_back(tr[0].son[i]); // 不要忘记这里的 fail
}
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) {
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i];
g[tr[tr[u].fail].son[i]].push_back(tr[u].son[i]); // 记录 fail 树
q.push(tr[u].son[i]);
} else
tr[u].son[i] = tr[tr[u].fail].son[i];
}
}
}
void query(char t[]) {
int u = 0;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a'];
tr[u].ans++;
}
}
void dfs(int u) {
for (int v : g[u]) {
dfs(v);
tr[u].ans += tr[v].ans;
}
ans[tr[u].idx] = tr[u].ans;
}
} // namespace AC
char s[LEN];
int idx[N];
int main() {
AC::init();
scanf("%d", &n);
for (int i = 1; i <= n; i++) {
scanf("%s", s + 1);
AC::insert(s, idx[i]);
AC::ans[i] = 0;
}
AC::build();
scanf("%s", s + 1);
AC::query(s);
AC::dfs(0);
for (int i = 1; i <= n; i++) {
printf("%d\n", AC::ans[idx[i]]);
}
return 0;
}
|
本页面最近更新:2026/5/13 11:36:39,更新历史
发现错误?想一起完善? 在 GitHub 上编辑此页!
本页面贡献者:Ir1d, Tiphereth-A, sshwy, ksyx, Marcythm, orzAtalod, Xeonacid, c-forrest, Enter-tainer, GavinZhengOI, Henry-ZHR, iamtwz, shuzhouliu, 383494, abc1763613206, alphagocc, aofall, Chrogeek, CoelacanthusHex, Dafenghh, DanJoshua, Early0v0, Gesrua, GoodCoder666, HeRaNO, kenlig, liangbob2023, lyccrius, Menci, opsiff, ouuan, partychicken, Persdre, r-value, Rickyxrc, Ruakker, shawlleyw, StudyingFather, sun2snow, szdytom, Unnamed2964, XuYueming520, zica87, ZnPdCo, ZXyaang, lailai0916, qq2964, rickyxrc
本页面的全部内容在 CC BY-SA 4.0 和 SATA 协议之条款下提供,附加条款亦可能应用