三角剖分
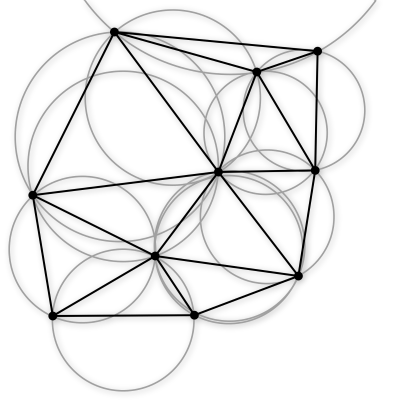
在几何中,三角剖分是指将平面对象细分为三角形,并且通过扩展将高维几何对象细分为单纯形. 对于一个给定的点集,有很多种三角剖分,如:

OI 中的三角剖分主要指二维几何中的完美三角剖分(二维 Delaunay 三角剖分,简称 DT).
Delaunay 三角剖分
定义
在数学和计算几何中,对于给定的平面中的离散点集 
- 空圆性:DT(
- 最大化最小角:在点集
性质
- 最接近:以最接近的三点形成三角形,且各线段(三角形的边)皆不相交.
- 唯一性:不论从区域何处开始构建,最终都将得到一致的结果(点集中任意四点不能共圆).
- 最优性:任意两个相邻三角形构成的凸四边形的对角线如果可以互换的话,那么两个三角形六个内角中最小角度不会变化.
- 最规则:如果将三角剖分中的每个三角形的最小角进行升序排列,则 Delaunay 三角剖分的排列得到的数值最大.
- 区域性:新增、删除、移动某一个顶点只会影响邻近的三角形.
- 具有凸边形的外壳:三角剖分最外层的边界形成一个凸多边形的外壳.
构造 DT 的分治算法
DT 有很多种构造算法,在
分治构造 DT 的第一步是将给定点集按照

一旦点集有序,我们就可以不断地将其分成两个部分(分治),直到子点集大小不超过

然后在分治回溯的过程中,已经剖分好的左右子点集可以依次合并.合并后的剖分包含 LL-edge(左侧子点集的边).RR-edge(右侧子点集的边),LR-edge(连接左右剖分产生的新的边),如图 LL-edge(灰色),RR-edge(红色),LR-edge(蓝色).对于合并后的剖分,为了维持 DT 性质,我们 可能 需要删除部分 LL-edge 和 RR-edge,但我们在合并时 不会 增加 LL-edge 和 RR-edge.

合并左右两个剖分的第一步是插入 base LR-edge,base LR-edge 是 最底部 的不与 任何 LL-edge 及 RR-edge 相交的 LR-edge.

然后,我们需要确定下一条 紧接在 base LR-edge 之上的 LR-edge.比如对于右侧点集,下一条 LR-edge 的可能端点(右端点)为与 base LR-edge 右端点相连的 RR-edge 的另一端点(

对于可能的端点,我们需要按以下两个标准检验:
- 其对应 RR-edge 与 base LR-edge 的夹角小于
- base LR-edge 两端点和这个可能点三点构成的圆内不包含任何其它 可能点.

如上图,
对于左侧点集,我们做镜像处理即可.

当左右点集都不再含有符合标准的可能点时,合并即完成.当一个可能点符合标准,一条 LR-edge 就需要被添加,对于与需要添加的 LR-edge 相交的 LL-edge 和 RR-edge,将其删除.
当左右点集均存在可能点时,判断左边点所对应圆是否包含右边点,若包含则不符合;对于右边点也是同样的判断.一般只有一个可能点符合标准(除非四点共圆).

当这条 LR-edge 添加好后,将其作为 base LR-edge 重复以上步骤,继续添加下一条,直到合并完成.

代码
实现
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 | |
Voronoi 图
Voronoi 图由一组由连接两邻点直线的垂直平分线组成的连续多边形组成,根据
Voronoi 图是 Delaunay 三角剖分的对偶图,可以使用构造 Delaunay 三角剖分的分治算法求出三角网,再使用最左转线算法求出其对偶图实现在
题目
SGU 383 Caravans 三角剖分 + 倍增
ContestHunter. 无尽的毁灭 三角剖分求对偶图建 Voronoi 图
Codeforces Gym 103485M. Constellation collection 三角剖分之后建图进行 Floodfill
参考资料与拓展阅读
- Wikipedia - Triangulation (geometry)
- Wikipedia - Delaunay triangulation
- Samuel Peterson -Computing Constrained Delaunay Triangulations in 2-D (1997-98)
本页面最近更新:2026/1/7 08:56:54,更新历史
发现错误?想一起完善? 在 GitHub 上编辑此页!
本页面贡献者:Ir1d, Tiphereth-A, Enter-tainer, xehoth, antileaf, corchis-S, diauweb, ksyx, opsiff
本页面的全部内容在 CC BY-SA 4.0 和 SATA 协议之条款下提供,附加条款亦可能应用